





russtedrake PRO
Roboticist at MIT and TRI
MIT 6.821: Underactuated Robotics
Spring 2024, Lecture 23
Follow live at https://slides.com/d/v3rQ2yY/live
(or later at https://slides.com/russtedrake/spring24-lec23)
Image credit: Boston Dynamics
/// Base type for all action primitives
class ActionPrimitiveInterface
{
virtual bool IsCandidate(const State& state) const = 0;
virtual Container GetOutcomes(const State& state) const = 0;
virtual double EstimateActionCost(
const State& current, const State& target) const = 0;
virtual Container Execute(const State& state) = 0;
virtual double Ranking() const = 0;
};
OpenDishwasherDoor CloseDishwasherDoor StartDishwasher LoadSoapPacket PullOutLowerRack PullOutUpperRack PullOutSilverwareRack PushInLowerRack PushInUpperRack PushInSilverwareRack
PutPlateInDishwasher ReorientMug PutMugInDishwasher OptimisticPutMugInDishwasher PutSilverwareInDishwasher PushUnmanipulableDish SenseDishCounts SenseDishToManipulate
work by Calder Phillips-Grafflin et al. at TRI
DishTaskState(const DishState& active_dish_state,
int32_t clean_items_put_away, int32_t clean_items_in_dishwasher,
int32_t dirty_items_in_dishwasher,
int32_t dirty_items_available,
const DishwasherState& current_dishwasher_state);
DishState(const RigidTransformd& dish_pose, DishType dish_type,
DishProgress dish_progress, RackRequirement rack_required);
DishwasherState(bool known, bool door_open, bool lower_rack_out,
bool upper_rack_out, bool silverware_rack_out,
bool lower_rack_full, bool upper_rack_full,
bool silverware_rack_full, bool started, bool soap_loaded);enum class DishType : uint8_t {
Unknown = 0x00,
Mug = 0x01,
Plate = 0x02,
Silverware = 0x03
};
enum class RackRequirement : uint8_t {
Unknown = 0x00,
LowerRack = 0x01,
UpperRack = 0x02,
SilverwareRack = 0x03
};enum class DishProgress : uint8_t {
Unknown = 0x00,
Unmanipulable = 0x01,
LikelyManipulable = 0x02,
Sensed = 0x03,
OptimisticOriented = 0x04,
Oriented = 0x05,
Placed = 0x06,
Released = 0x07
};work by Calder Phillips-Grafflin et al. at TRI
https://en.wikipedia.org/wiki/Stanford_Research_Institute_Problem_Solver
/// Base type for all action primitives
class ActionPrimitiveInterface
{
virtual bool IsCandidate(const State& state) const = 0;
virtual Container GetOutcomes(const State& state) const = 0;
...
};
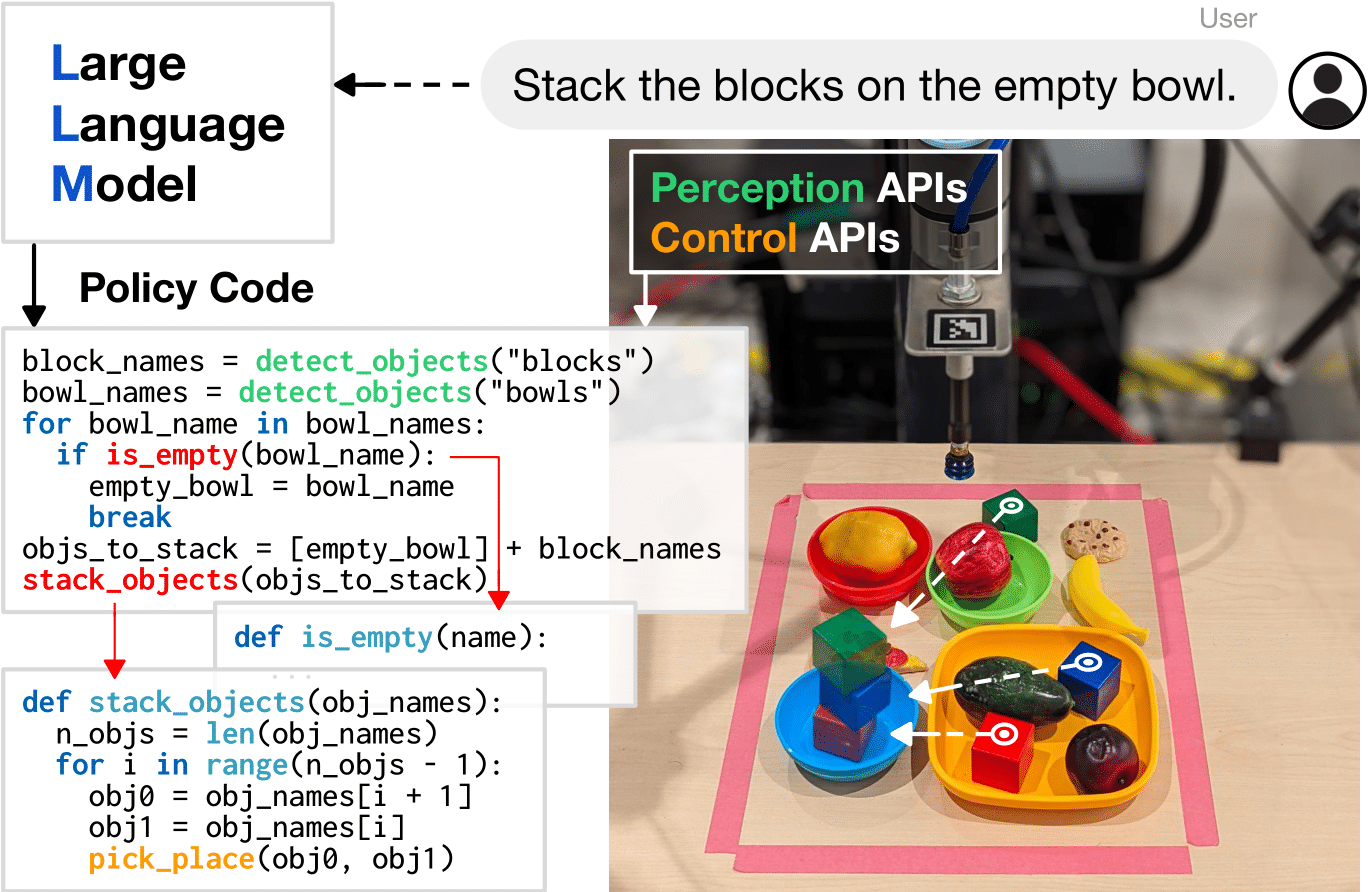
In the dish-loading example, we replan before each action to handle unexpected outcomes...
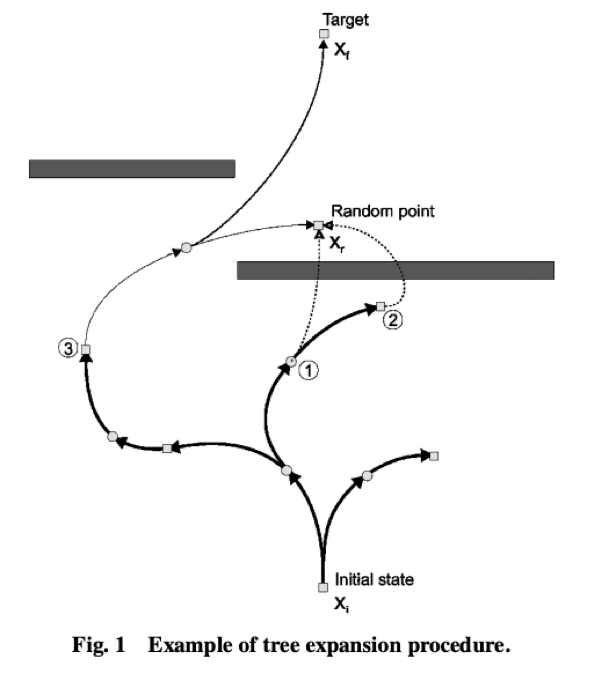
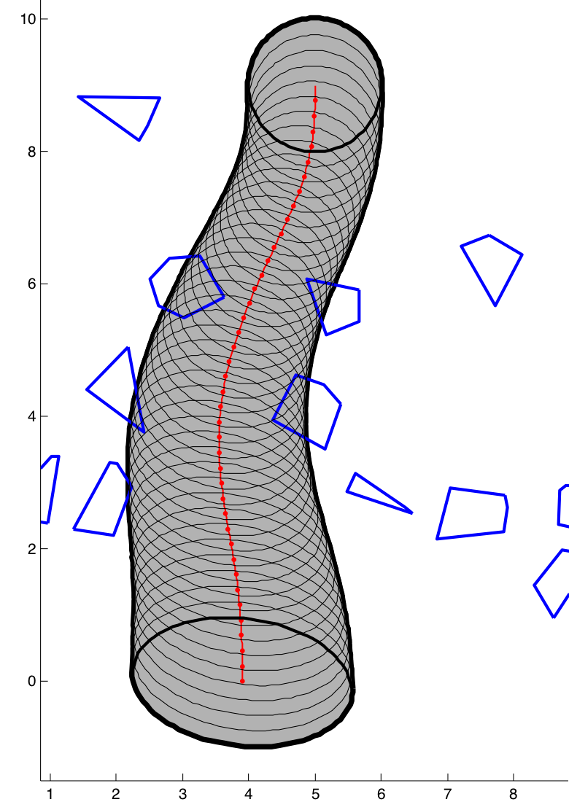
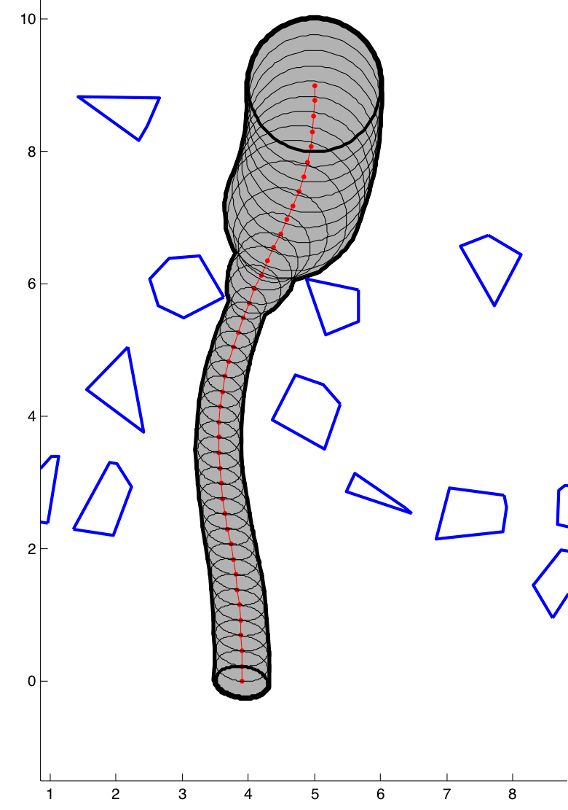
RRT* (Karaman and Frazzoli)
Martin Buehler and Dan Koditschek
Al Rizzi and Dan Koditschek
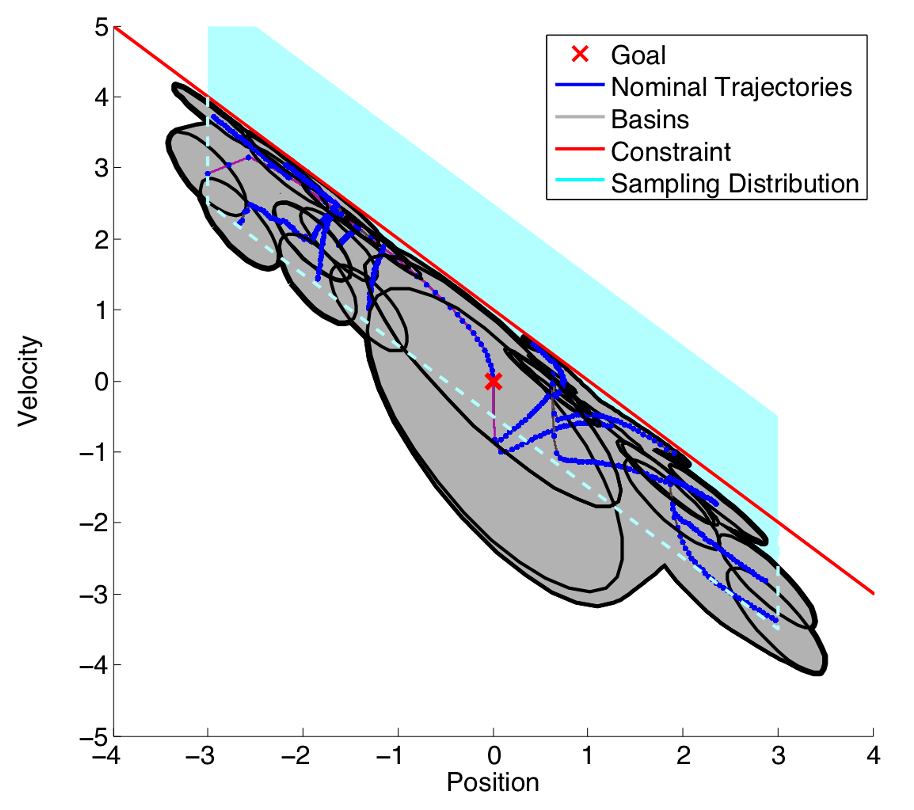
Rob Burridge, Al Rizzi, and Dan Koditschek
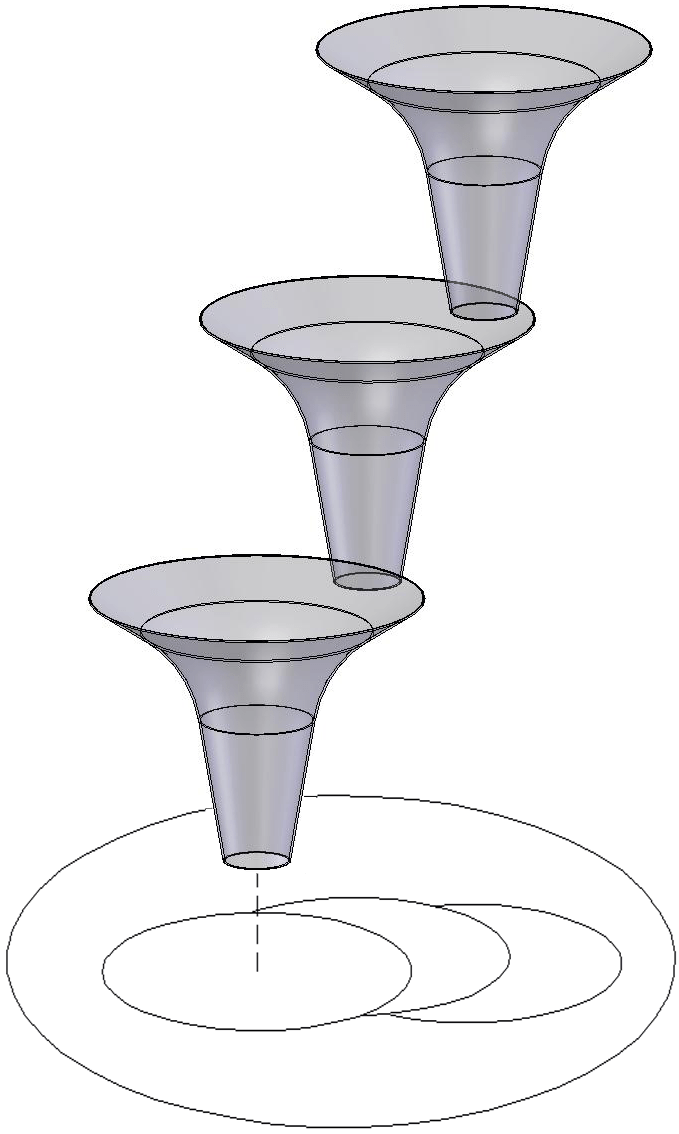
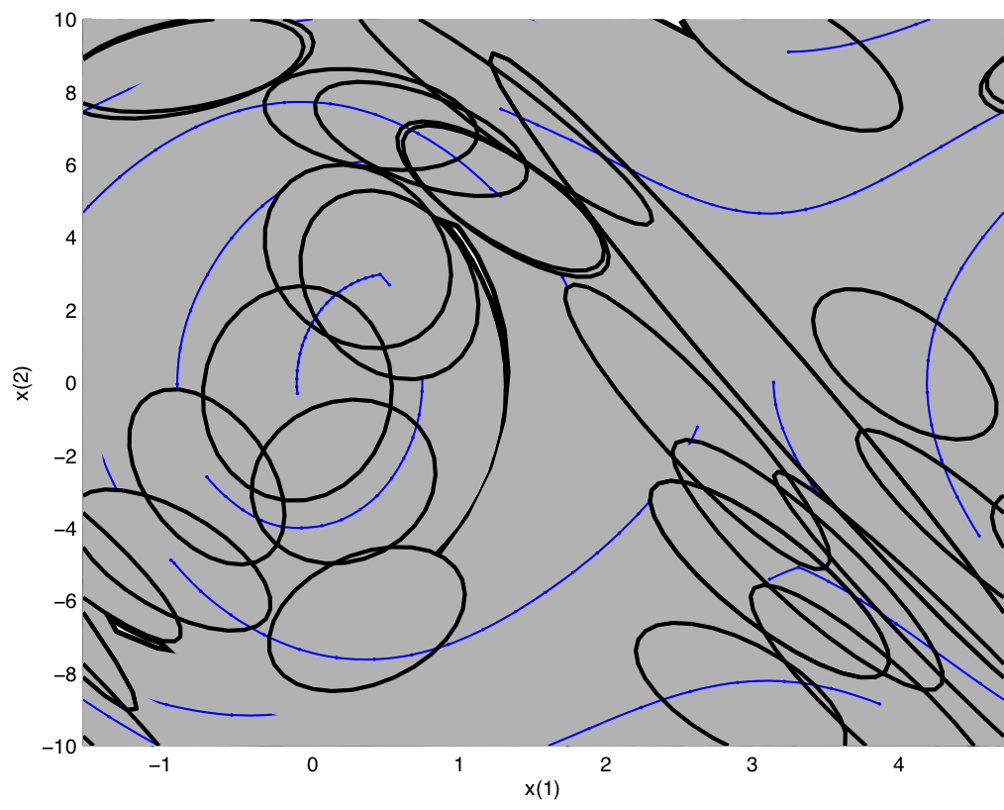
Probabilistic Feedback Coverage
By russtedrake
MIT Underactuated Robotics Spring 2024 http://underactuated.csail.mit.edu



