








russtedrake PRO
Roboticist at MIT and TRI
MIT 6.421
Robotic Manipulation
Fall 2023, Lecture 13
Follow live at https://slides.com/d/uPcX7cE/live
(or later at https://slides.com/russtedrake/fall23-lec13)
PR2 by Willow Garage
Eve by 1x
Toyota Research Institute Mobile Manipulator
Toyota HSR
Fetch by Fetch Robotics
Spot by Boston Dynamics
Everyday Robot by Google (DeepMind)
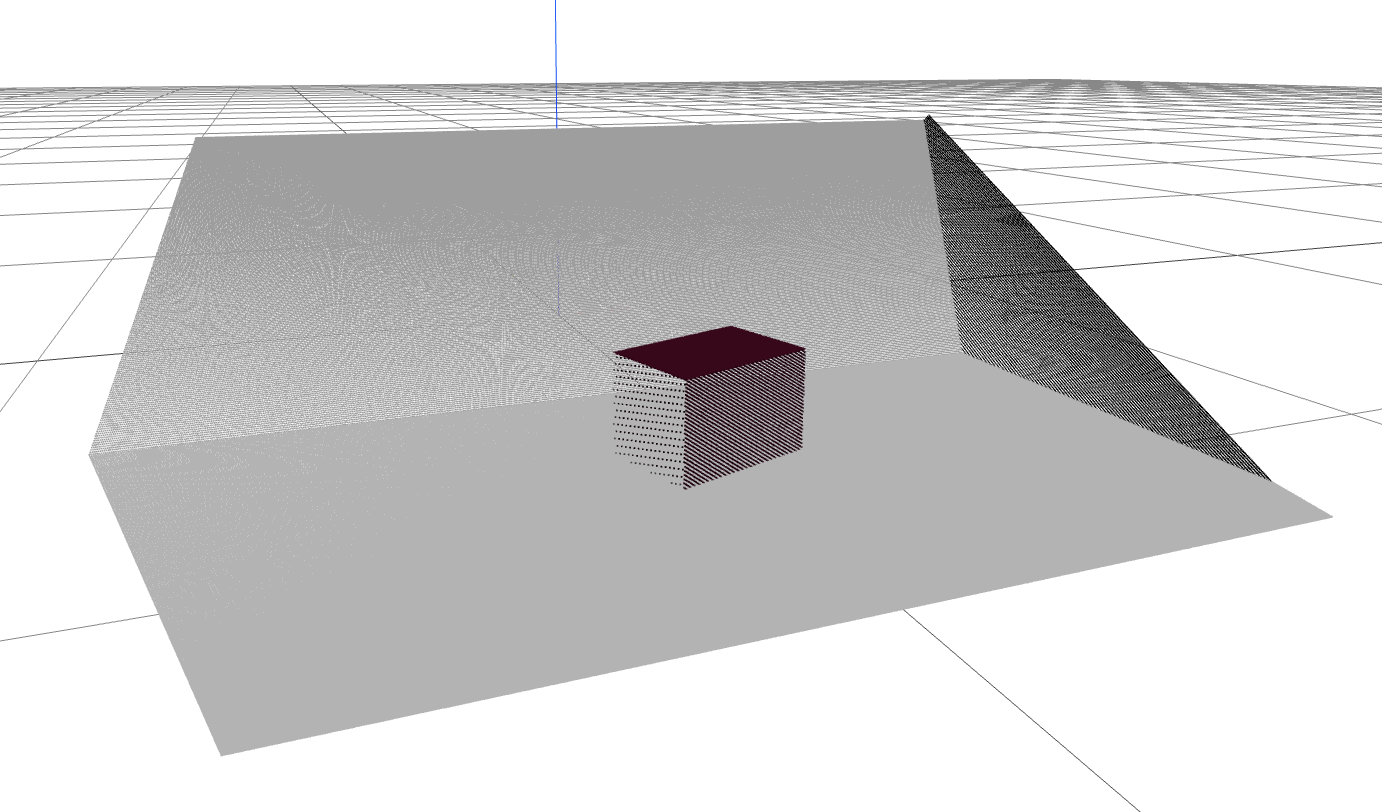
From pose_estimation_icp pset problem
To subtract out the background, we assumed:
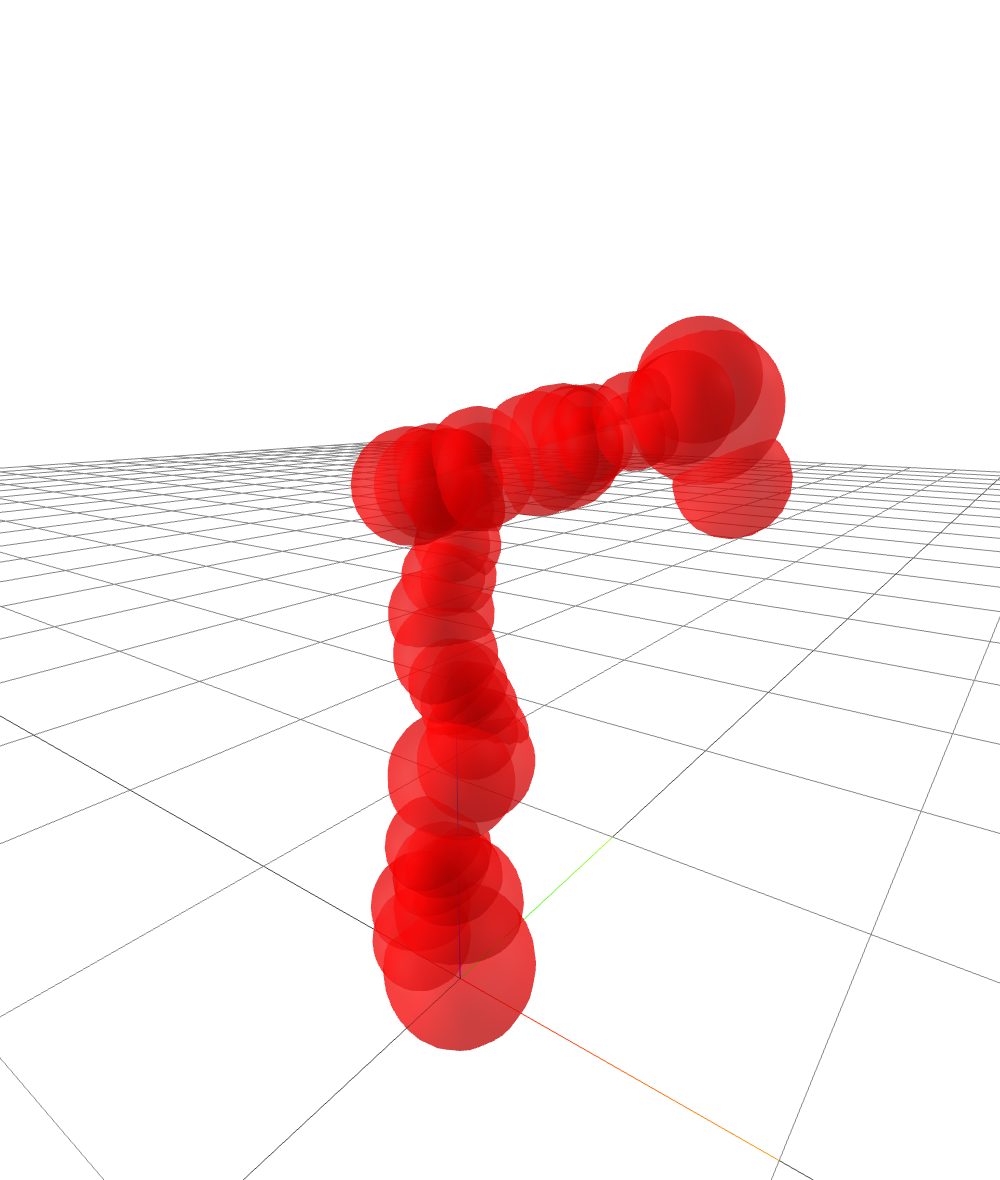
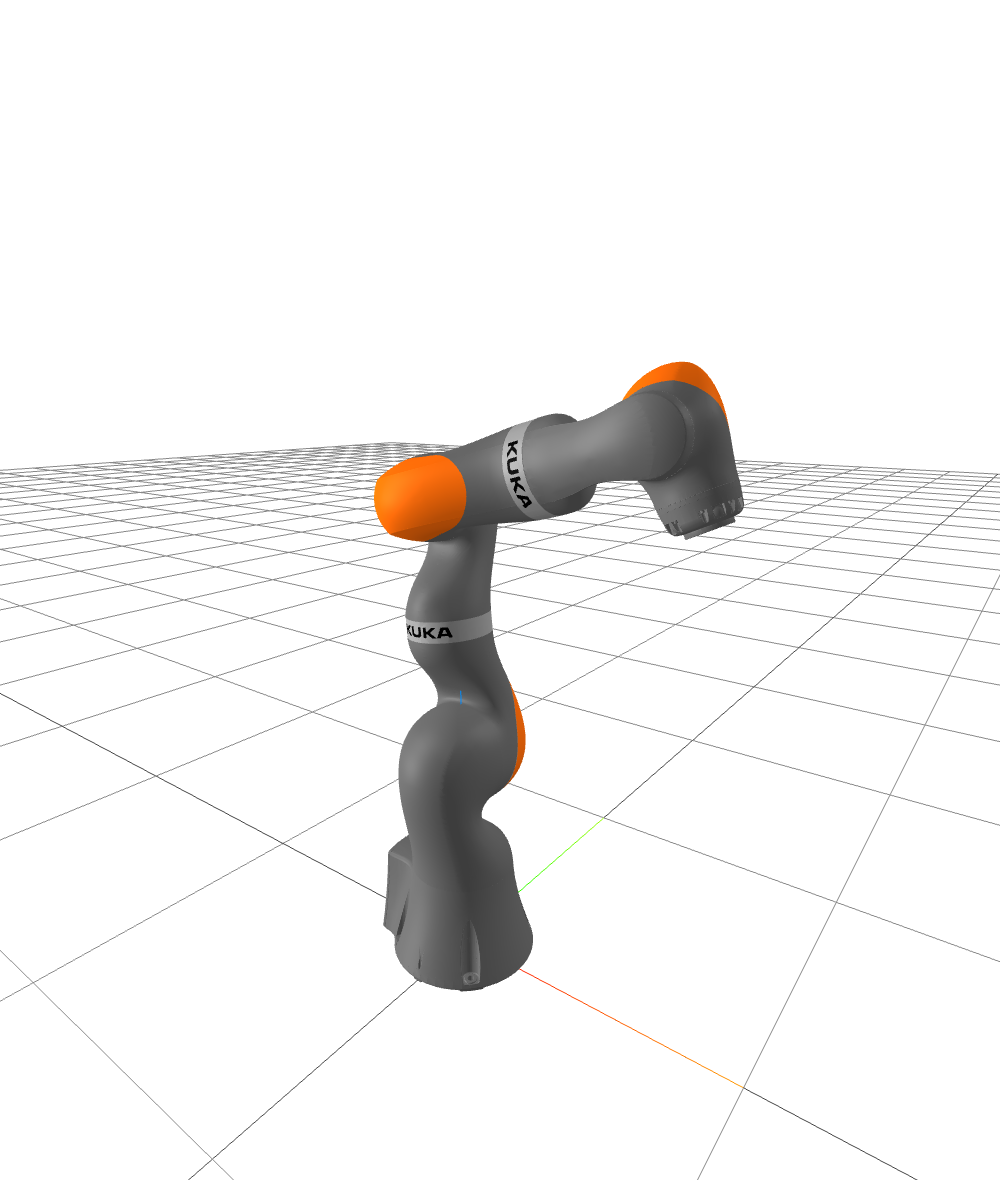
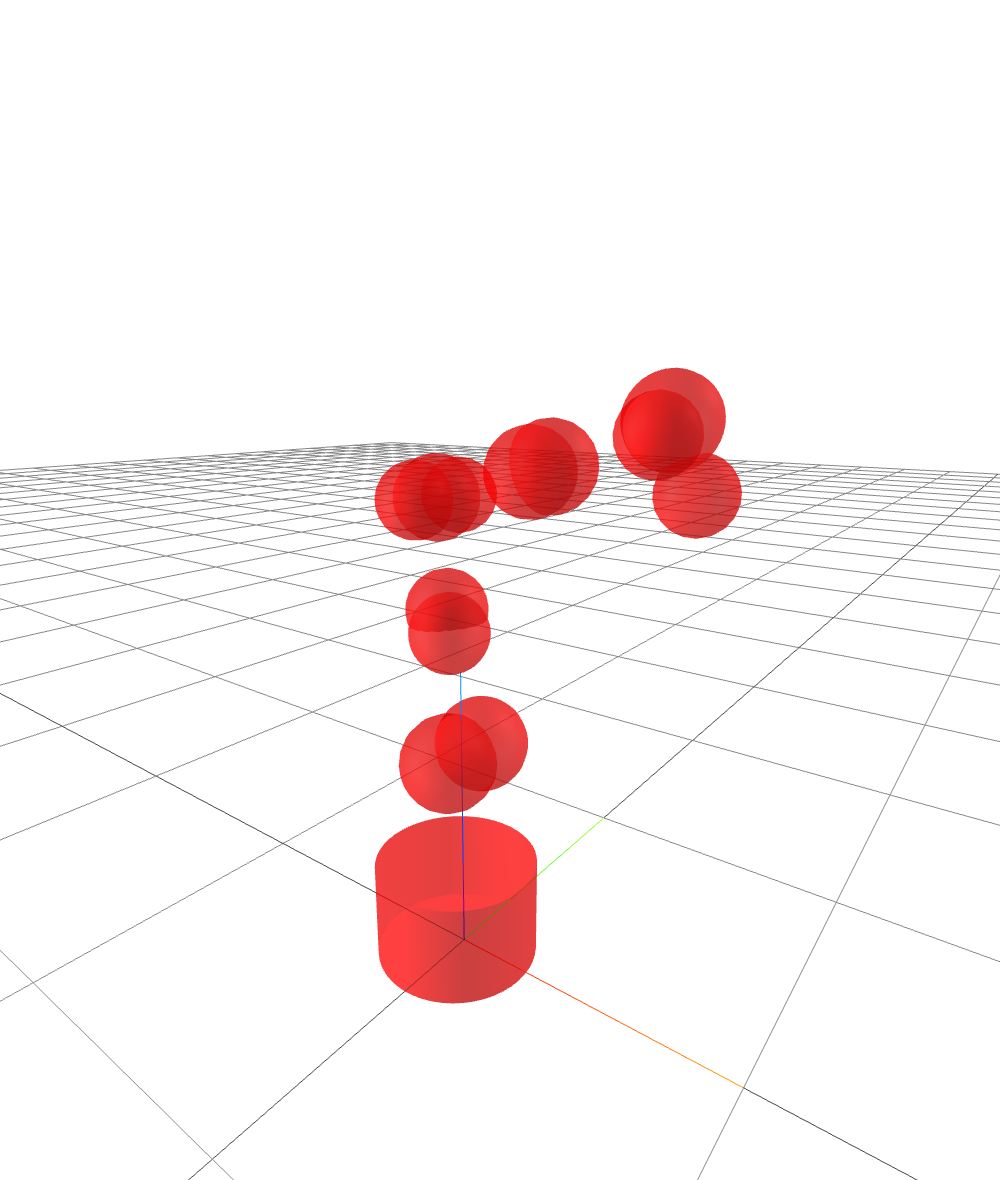
iiwa14_spheres_collision.urdf
iiwa14_spheres_dense_collision.urdf
...
<link name="base"/>
<link name="base_x"/>
<link name="base_y"/>
<joint name="iiwa_base_x" type="prismatic">
<parent link="base"/>
<child link="base_x"/>
<axis xyz="1 0 0"/>
</joint>
<joint name="iiwa_base_y" type="prismatic">
<parent link="base_x"/>
<child link="base_y"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="iiwa_base_z" type="prismatic">
<parent link="base_y"/>
<child link="iiwa_link_0"/>
<axis xyz="0 0 1"/>
<limit lower="0" upper="0.25"/>
</joint>
<link name="iiwa_link_0">
... ...
<link name="base"/>
<joint name="iiwa_base" type="fixed">
<parent link="base"/>
<child link="iiwa_link_0"/>
</joint>
<link name="iiwa_link_0">
...A small modification to the iiwa14.urdf...
(I've also removed the joint limits on joint 0)
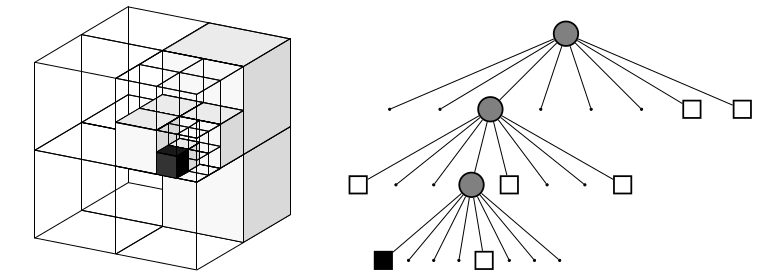
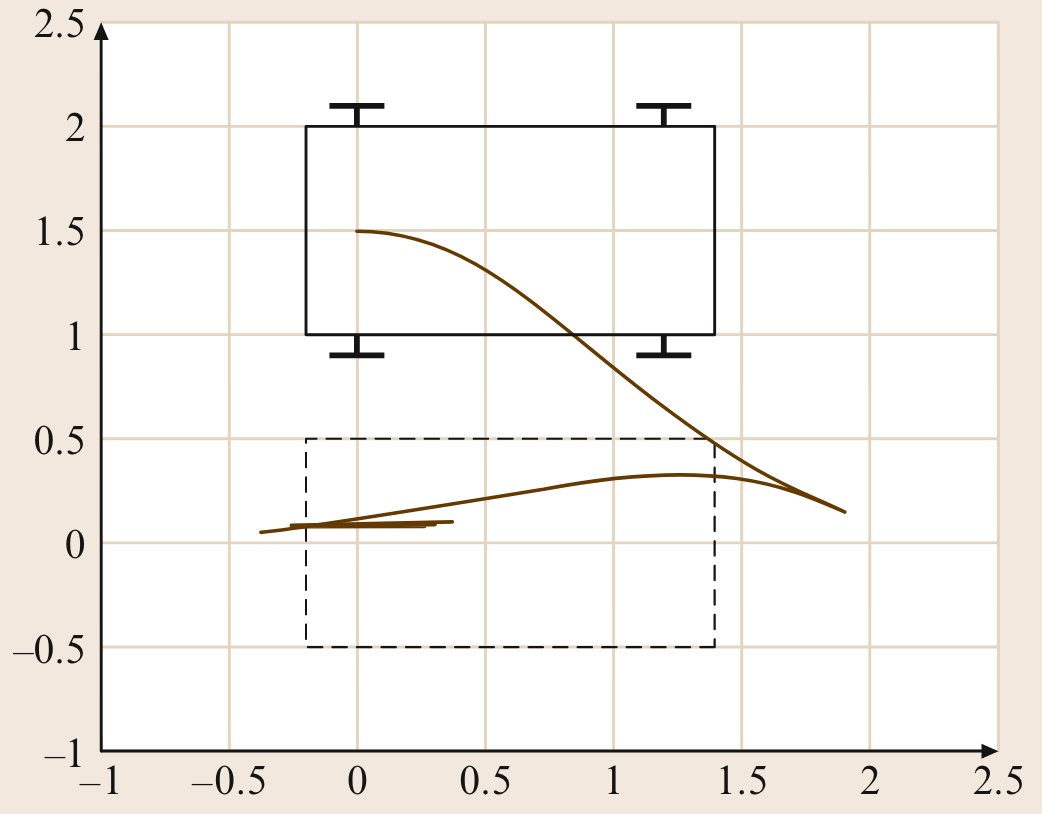
from Handbook of Robotics, Ch 49
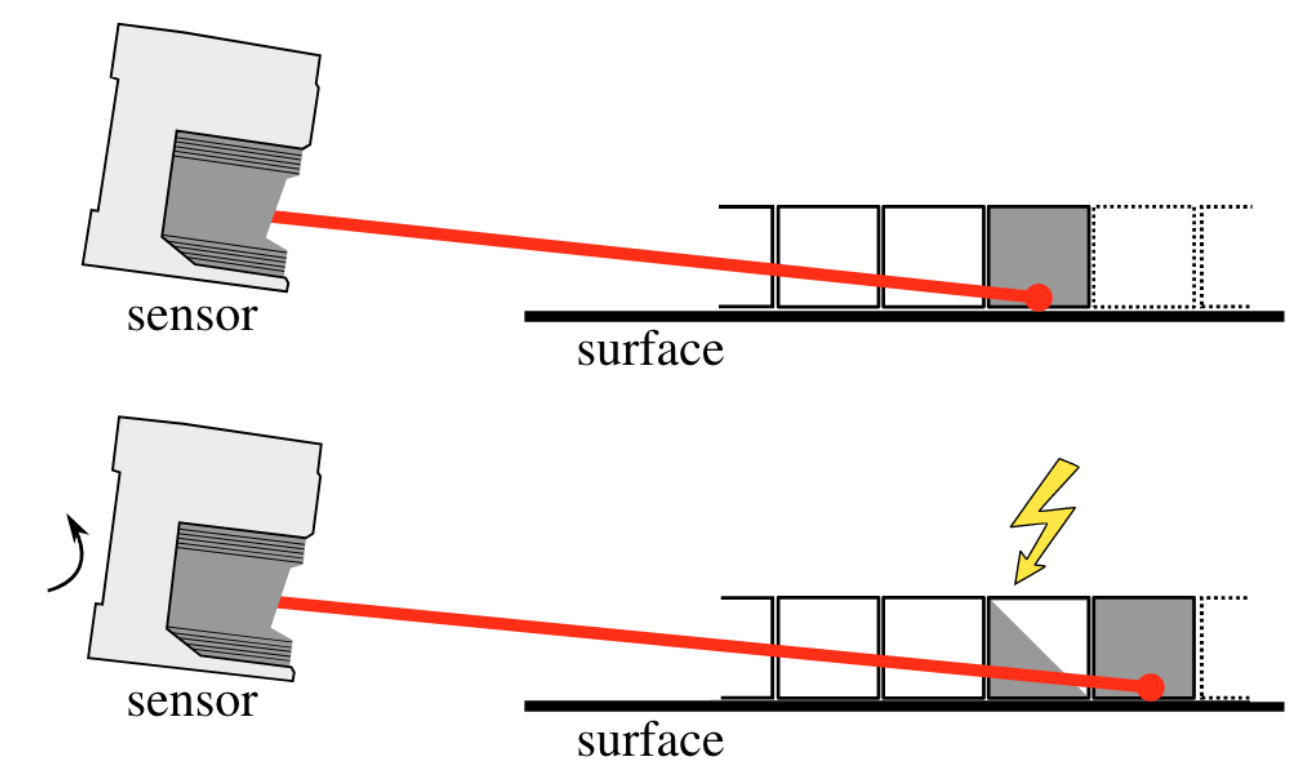
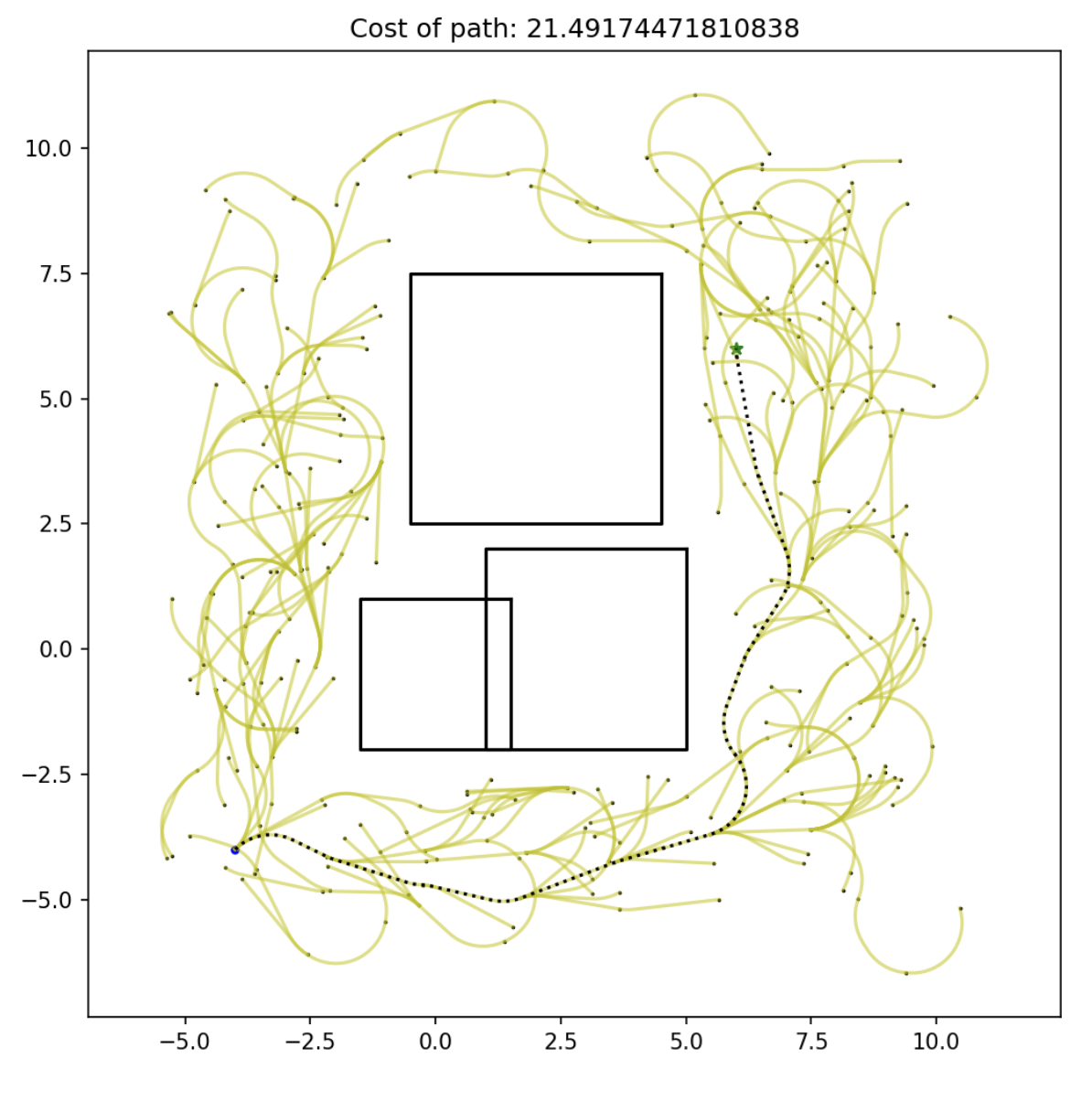
from https://arxiv.org/pdf/2206.10533.pdf
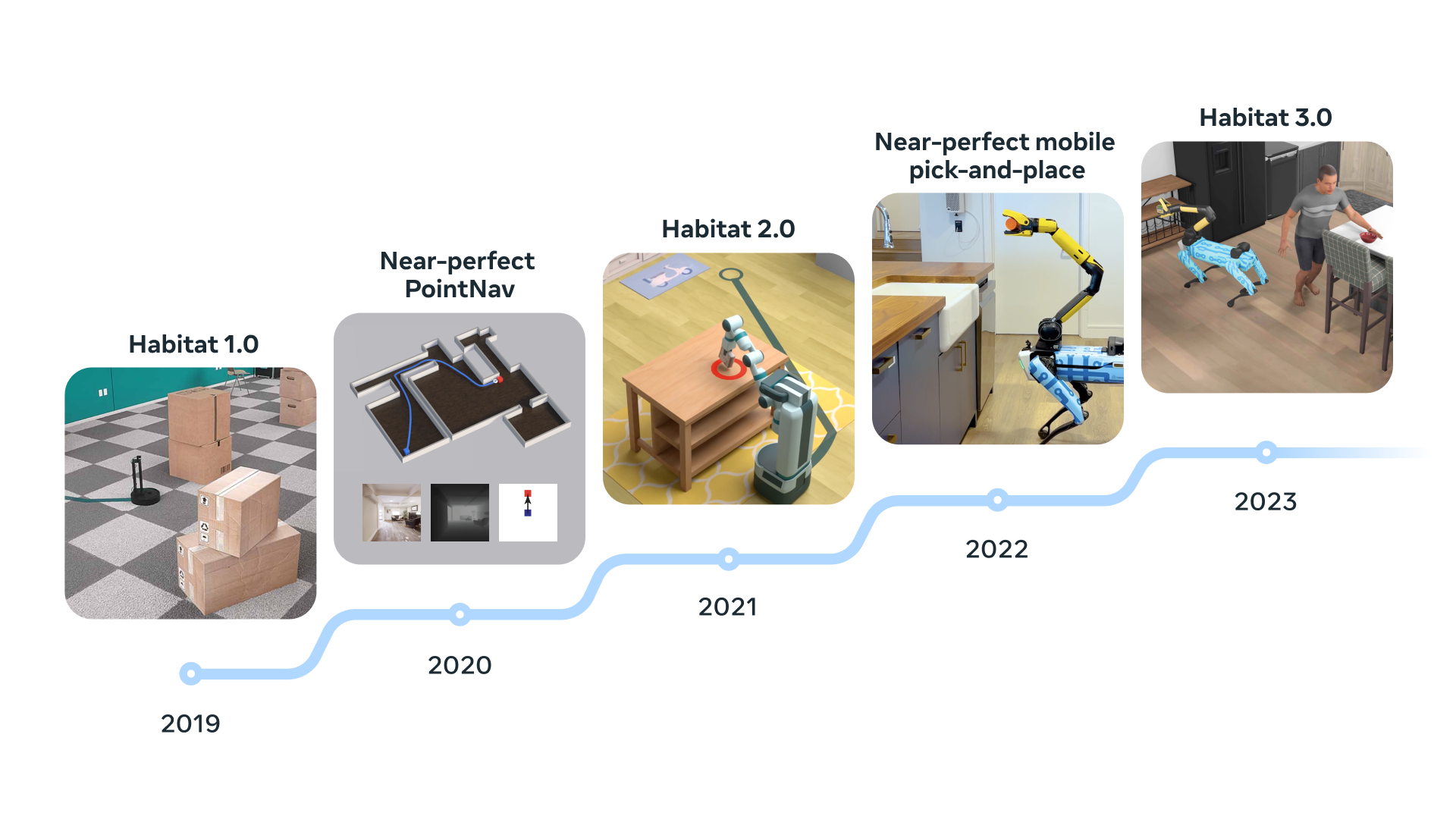
Behavior-1K
Habitat 3.0
ThreeDWorld
By russtedrake
MIT Robotic Manipulation Fall 2023 http://manipulation.csail.mit.edu


