Mobile Manipulation

MIT 6.421
Robotic Manipulation
Fall 2023, Lecture 13
Follow live at https://slides.com/d/uPcX7cE/live
(or later at https://slides.com/russtedrake/fall23-lec13)



PR2 by Willow Garage
Eve by 1x
Toyota Research Institute Mobile Manipulator




Toyota HSR
Fetch by Fetch Robotics
Spot by Boston Dynamics
Everyday Robot by Google (DeepMind)
What's different about mobile manipulation?
- What's different about Perception?
- Partial views + unknown environments
- State estimation (e.g. \({}^W \hat{X}^C.\))
- What's different about Kinematics/Motion Planning?
- Mobile base (holonomic vs nonholonomic)
- Continuous rotations require some care
- (often) Better kinematics!
- What's different about Simulation?
- Large scale scenes / asset curation
- Some new challenges in Navigation
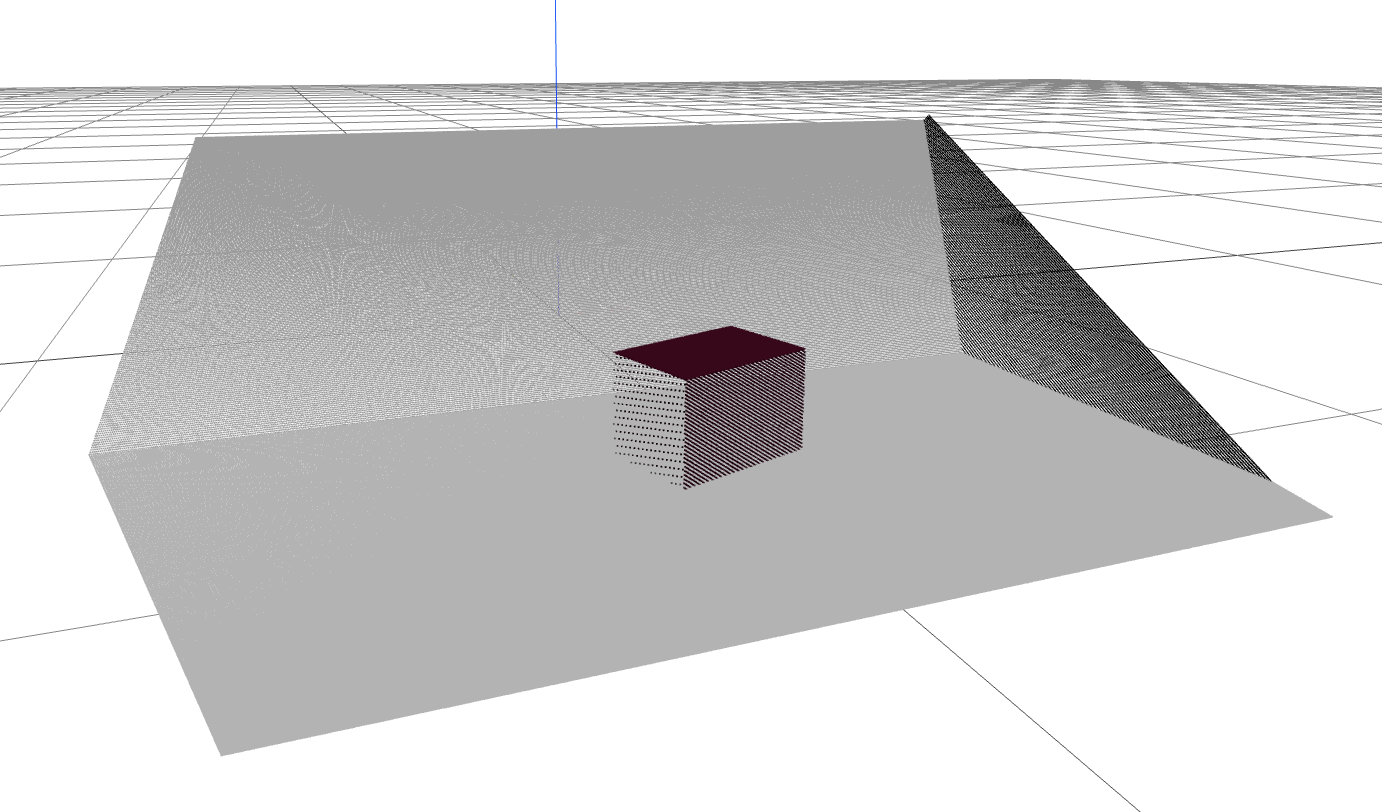
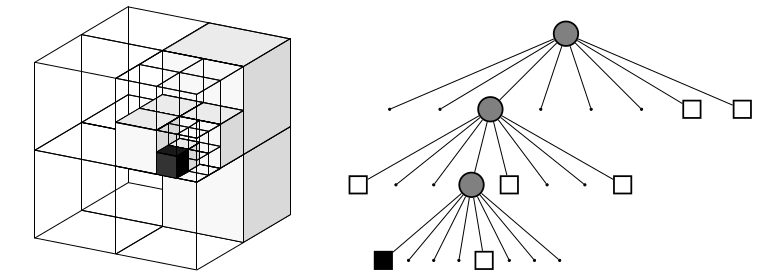
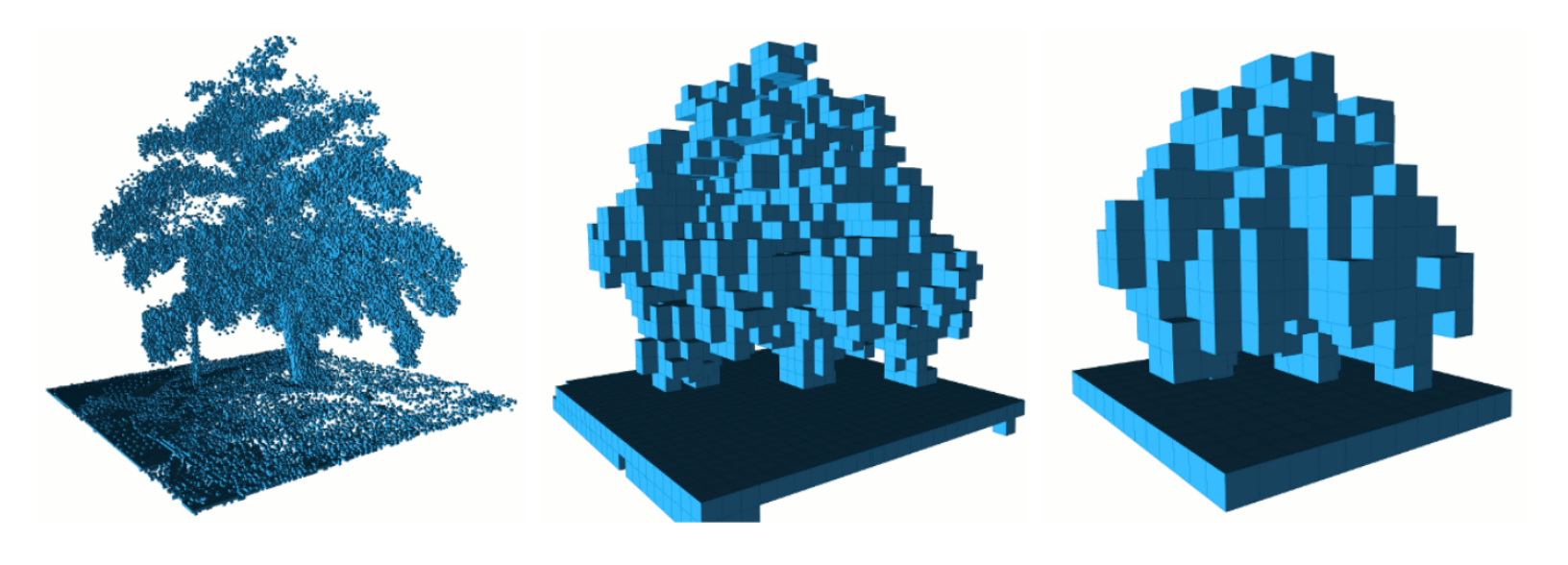
Partial views
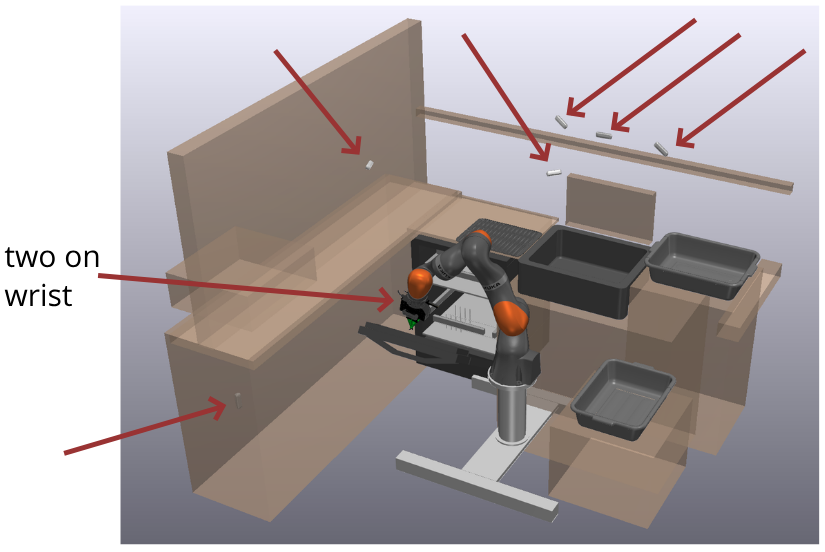

Unknown environments
From pose_estimation_icp pset problem
To subtract out the background, we assumed:
- known, fixed environment, and
- known transforms (e.g. \({}^WX^{C}\))
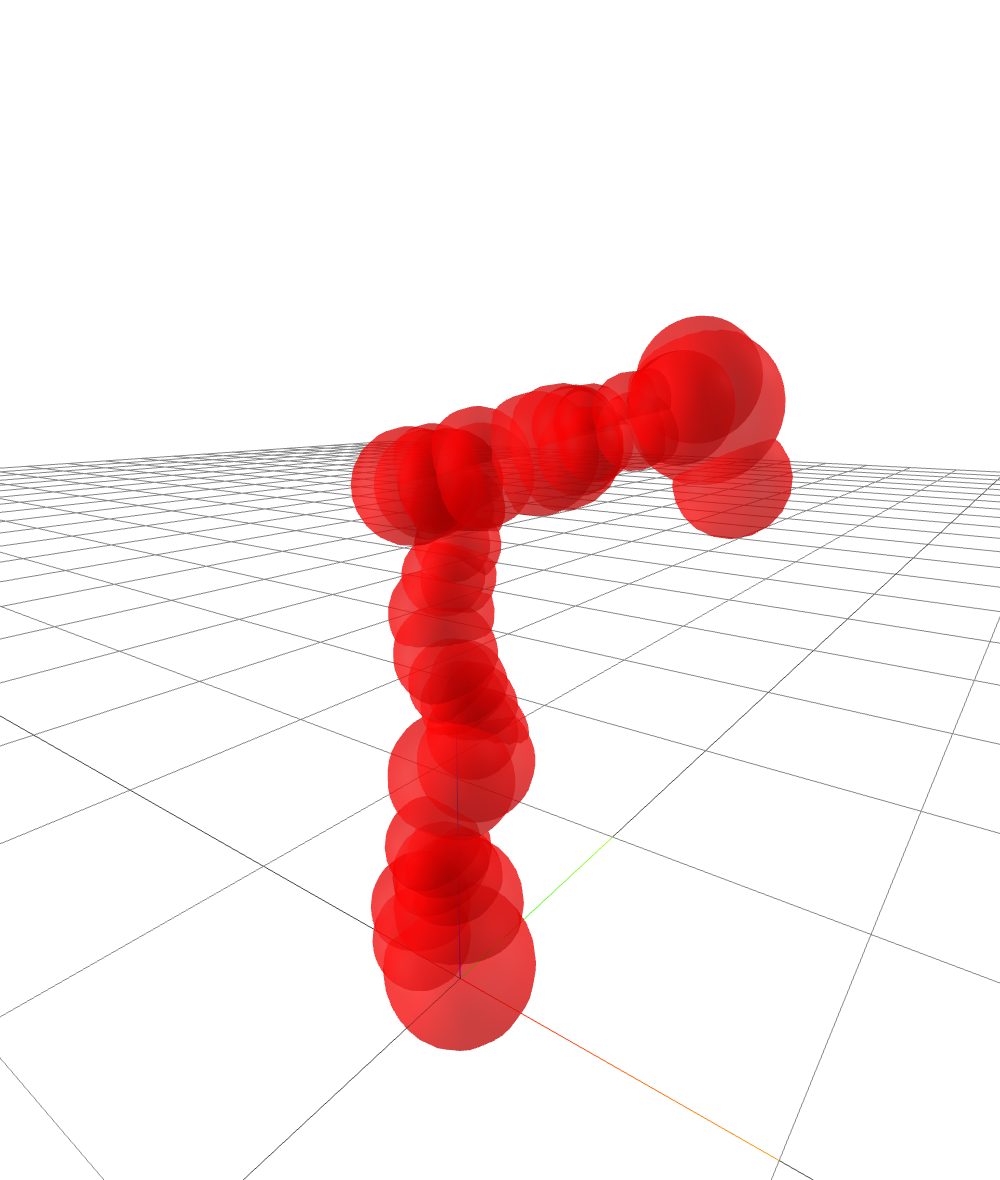
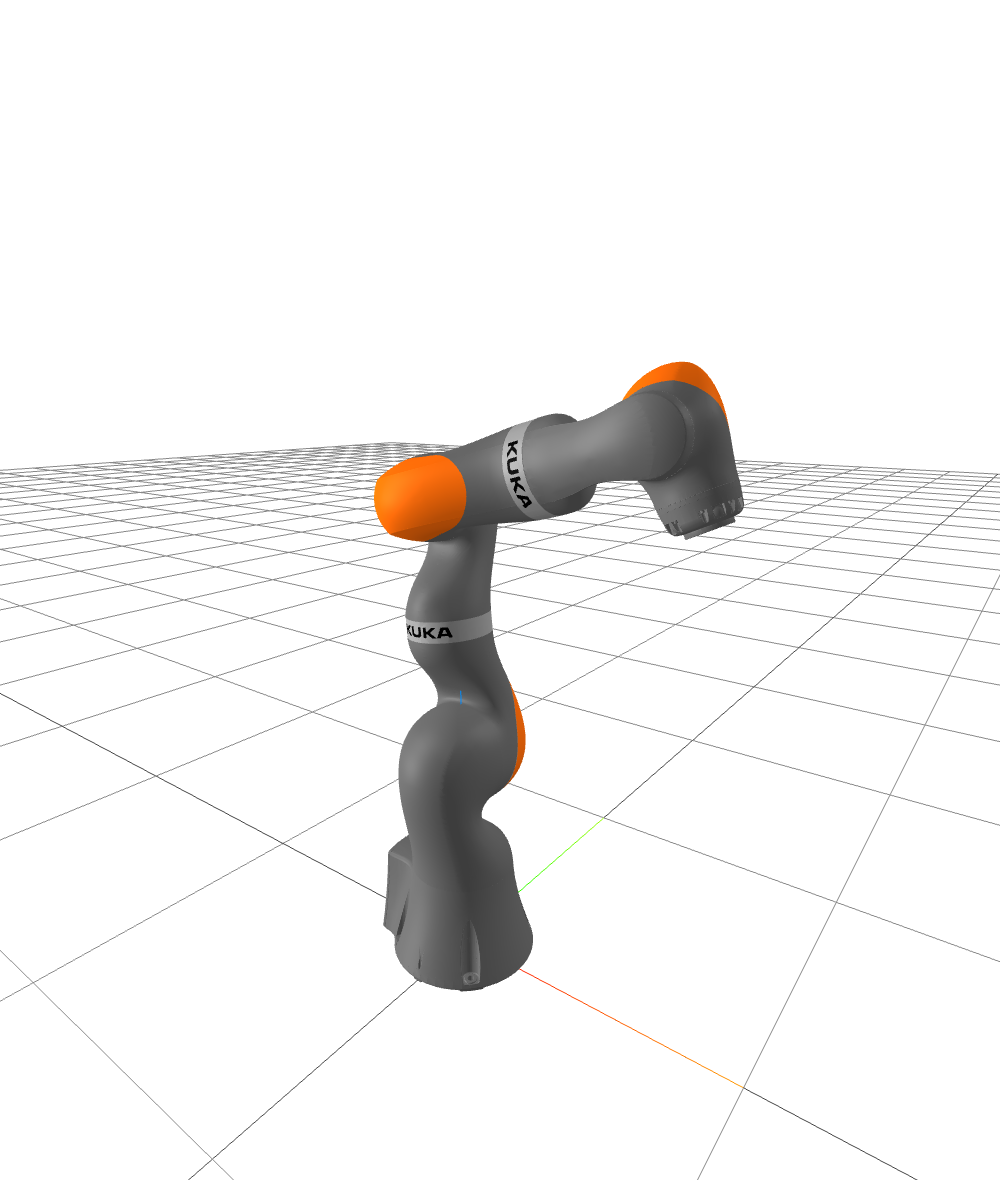
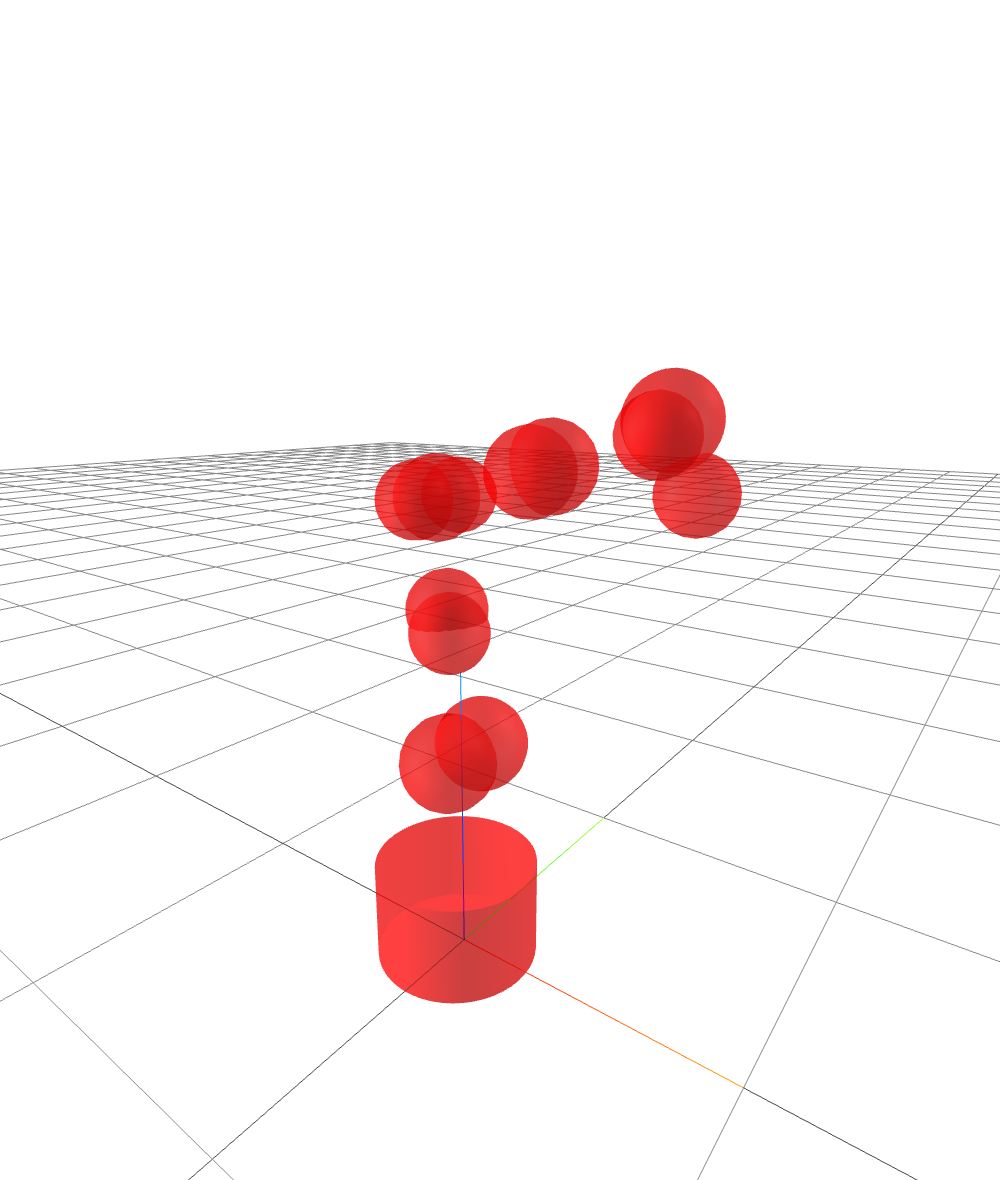
iiwa14_spheres_collision.urdf
iiwa14_spheres_dense_collision.urdf
What's different about mobile manipulation?
- What's different about Perception?
- Partial views + unknown environments
- State estimation (e.g. \({}^W \hat{X}^C.\))
- What's different about Kinematics/Motion Planning?
- Mobile base (holonomic vs nonholonomic)
- Continuous rotations require some care
- (often) Better kinematics!
- What's different about Simulation?
- Large scale scenes / asset curation
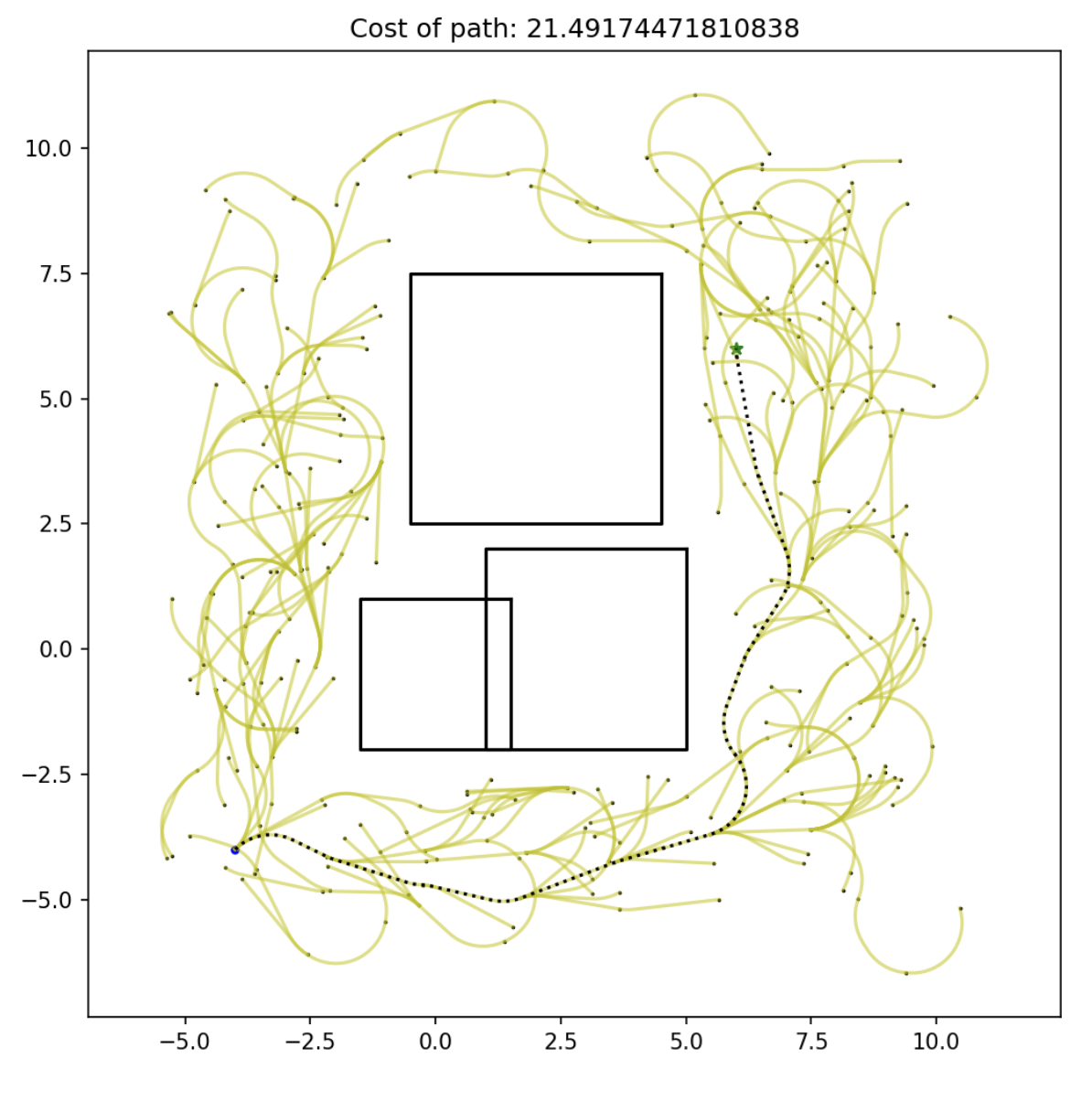
- Some new challenges in Navigation
...
<link name="base"/>
<link name="base_x"/>
<link name="base_y"/>
<joint name="iiwa_base_x" type="prismatic">
<parent link="base"/>
<child link="base_x"/>
<axis xyz="1 0 0"/>
</joint>
<joint name="iiwa_base_y" type="prismatic">
<parent link="base_x"/>
<child link="base_y"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="iiwa_base_z" type="prismatic">
<parent link="base_y"/>
<child link="iiwa_link_0"/>
<axis xyz="0 0 1"/>
<limit lower="0" upper="0.25"/>
</joint>
<link name="iiwa_link_0">
... ...
<link name="base"/>
<joint name="iiwa_base" type="fixed">
<parent link="base"/>
<child link="iiwa_link_0"/>
</joint>
<link name="iiwa_link_0">
...A small modification to the iiwa14.urdf...
(I've also removed the joint limits on joint 0)
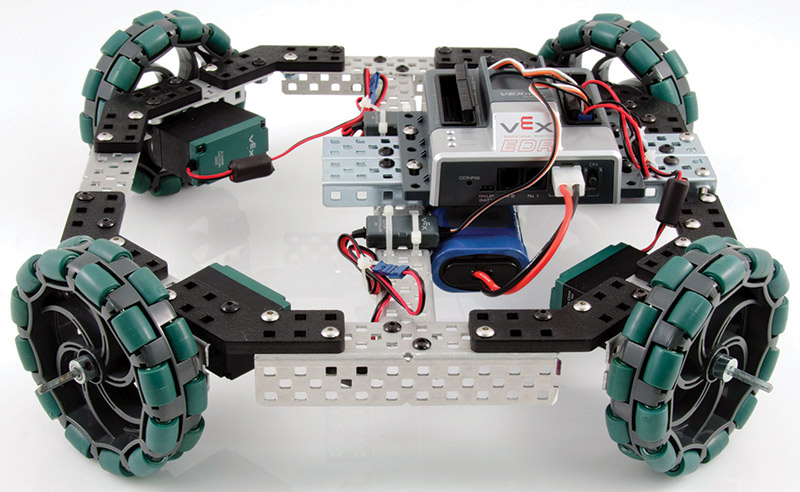
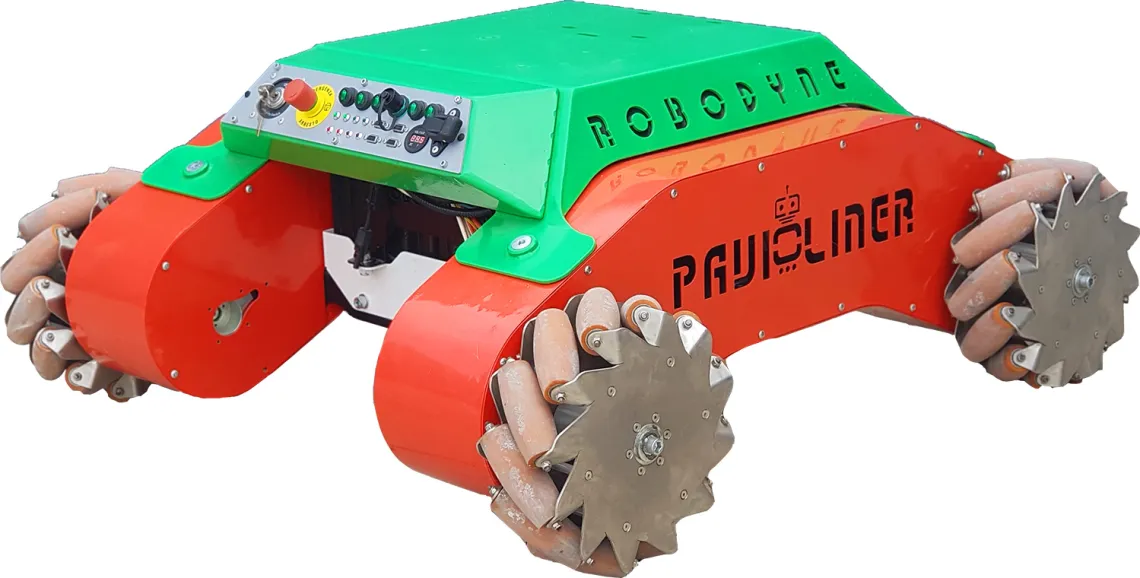
Holonomic mobile bases
Nonholonomic bases
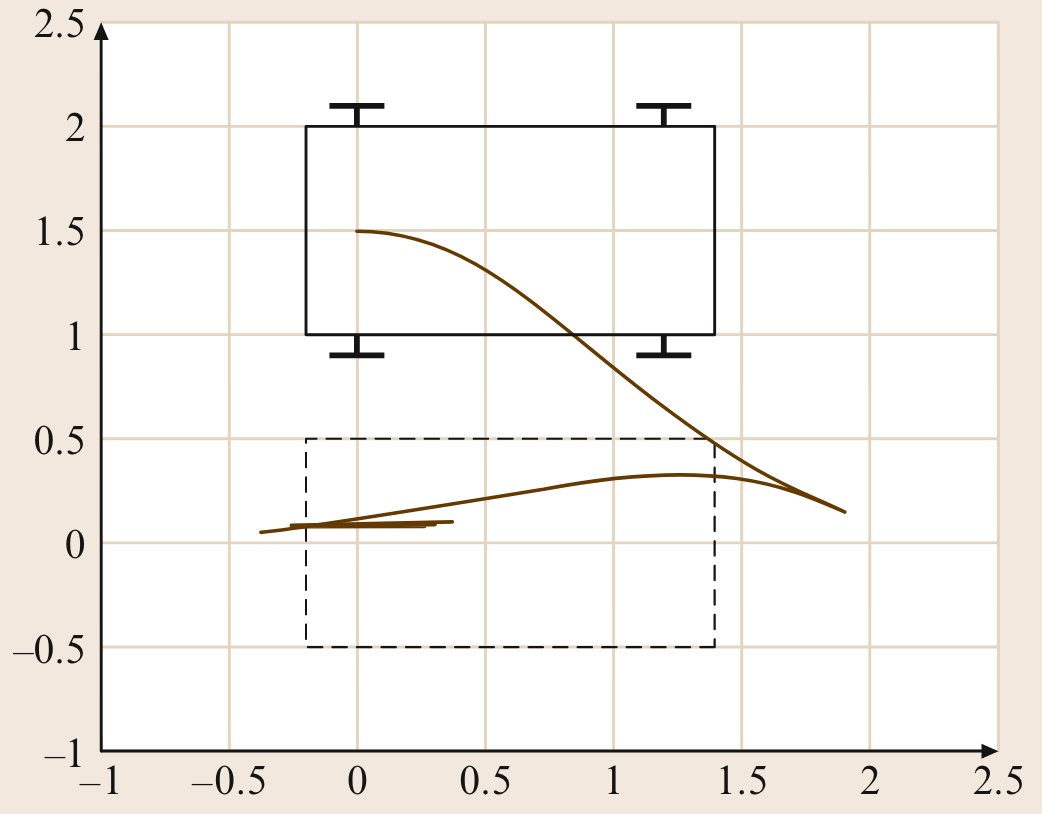
from Handbook of Robotics, Ch 49
from https://arxiv.org/pdf/2206.10533.pdf
What's different about mobile manipulation?
- What's different about Perception?
- Partial views + unknown environments
- State estimation (e.g. \({}^W \hat{X}^C.\))
- What's different about Kinematics/Motion Planning?
- Mobile base (holonomic vs nonholonomic)
- Continuous rotations require some care
- (often) Better kinematics!
- What's different about Simulation?
- Large scale scenes / asset curation
- Some new challenges in Navigation
Behavior-1K
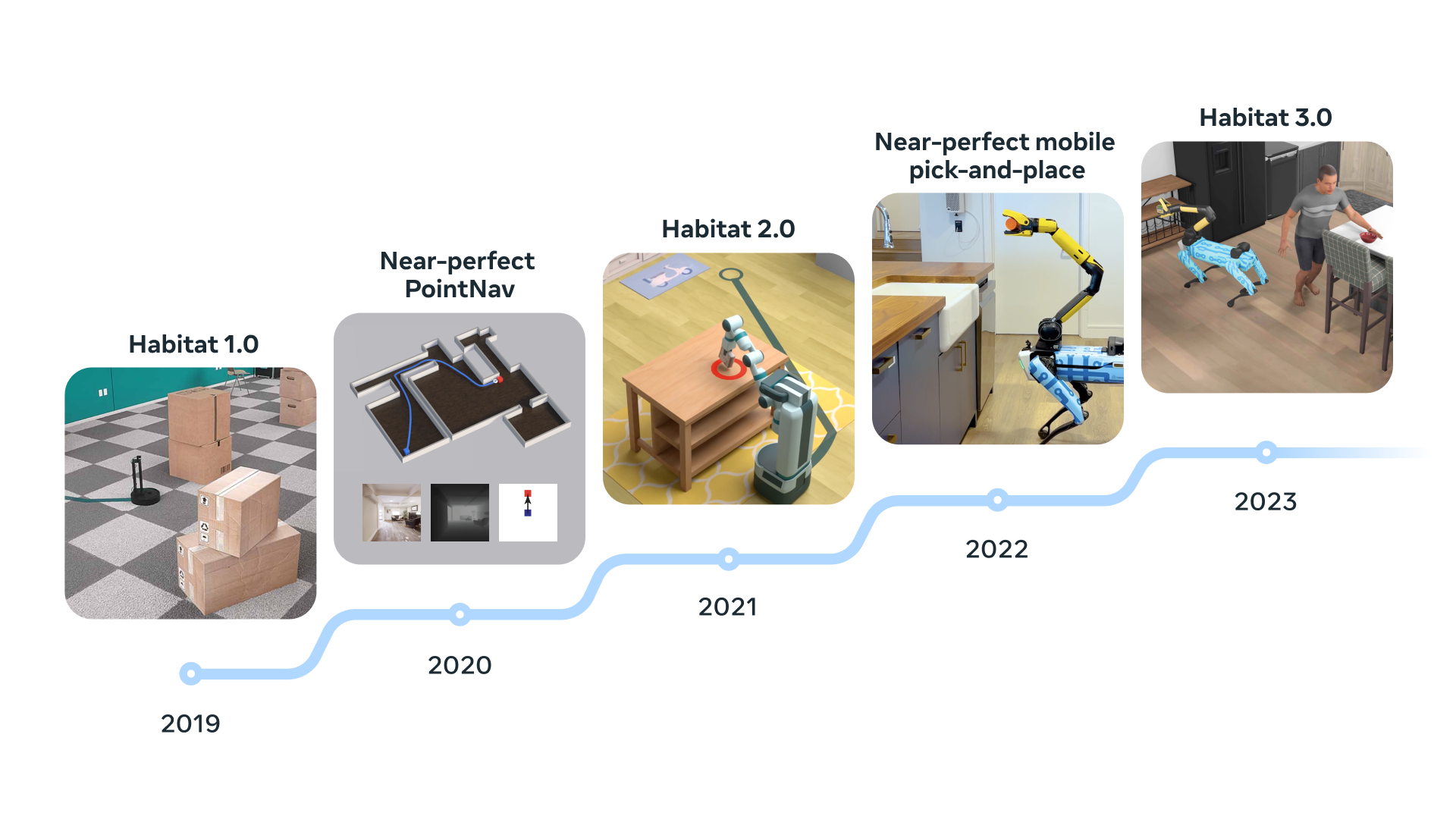
Habitat 3.0
ThreeDWorld