



russtedrake PRO
Roboticist at MIT and TRI
MIT 6.821: Underactuated Robotics
Spring 2024, Lecture 22
Follow live at https://slides.com/d/5oe04Is/live
(or later at https://slides.com/russtedrake/spring24-lec22)
Image credit: Boston Dynamics
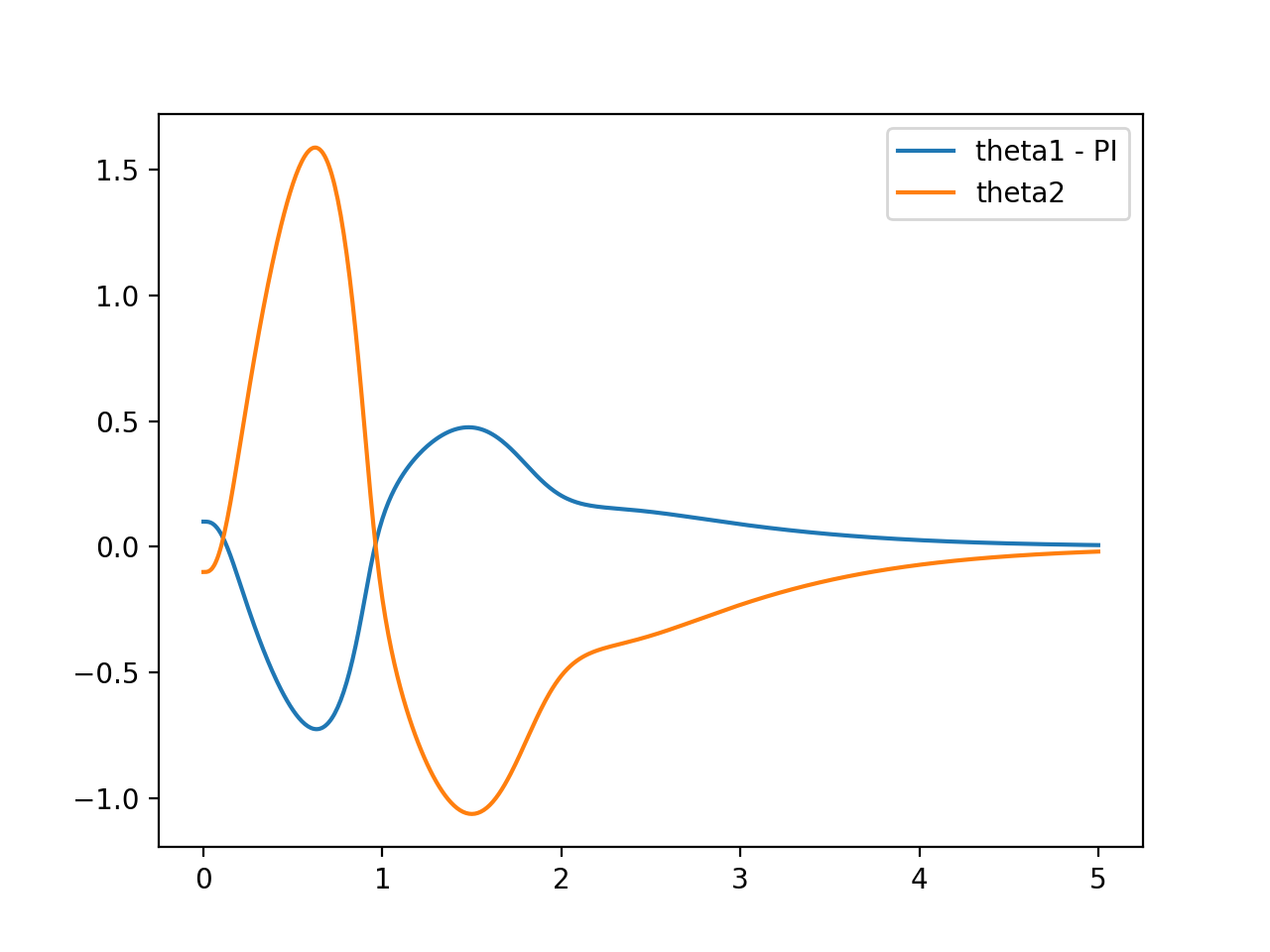
True acrobot state
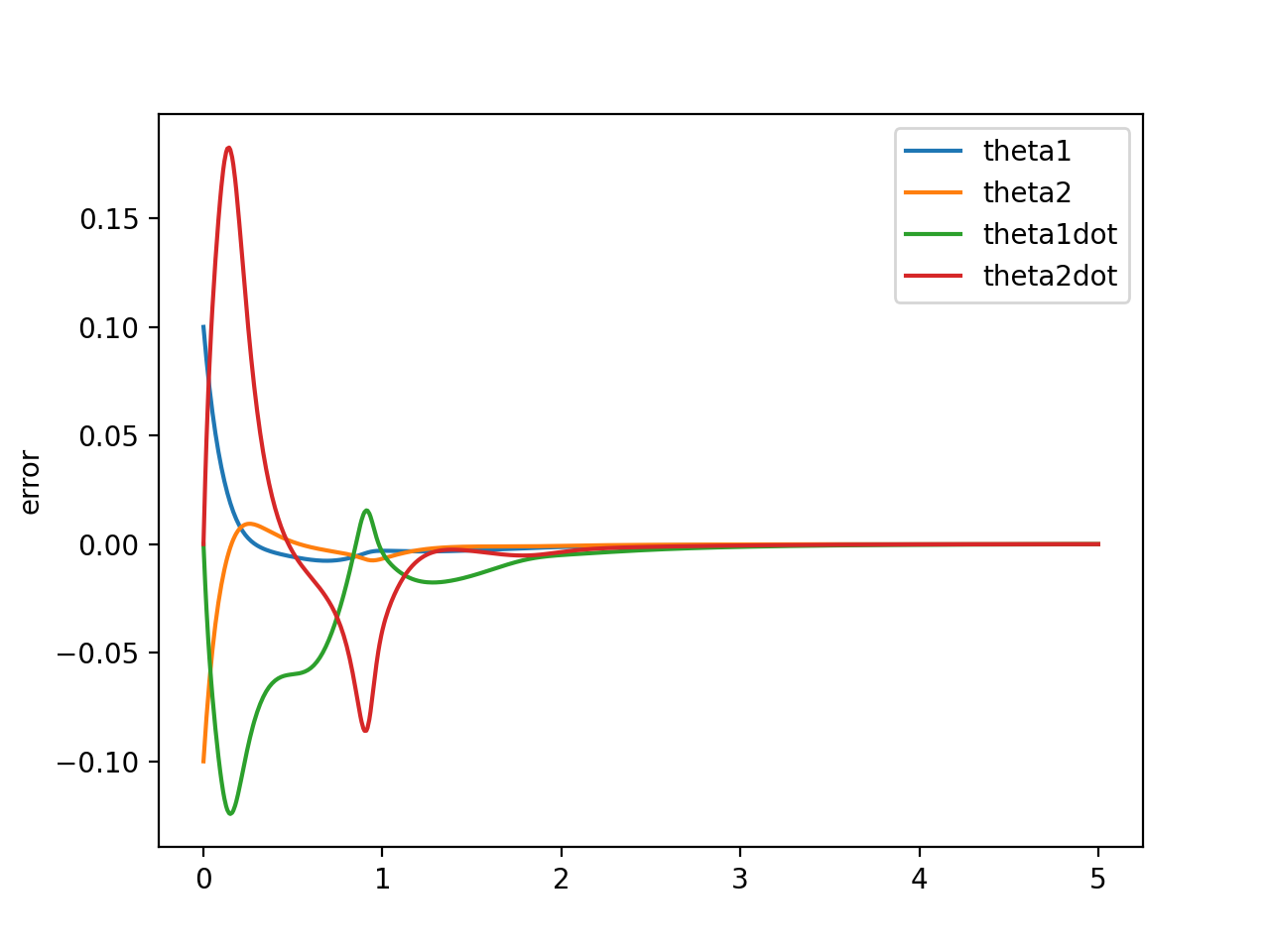
Estimator error \( (\hat{x} - x) \)
By russtedrake
MIT Underactuated Robotics Spring 2024 http://underactuated.csail.mit.edu



