Robotics and
Generative AI
Russ Tedrake
VP, Robotics Research

Dexterous Manipulation at TRI
My story

- Undergrad at UMich
- PhD at MIT
- Professor at MIT since 2005.
- in 2016, I helped start TRI
DARPA Robotics Competition, 2015
Robots are dancing and doing parkour.
Now computer vision is really starting to work...
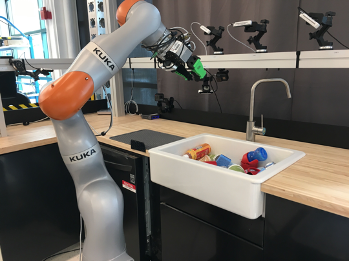
can they load the dishwasher?
The newest Machine Learning Revolution: Generative AI
for robotics; in a few slides
ImageNet: 14 Million labeled images
Released in 2009
"Self-supervised" learning
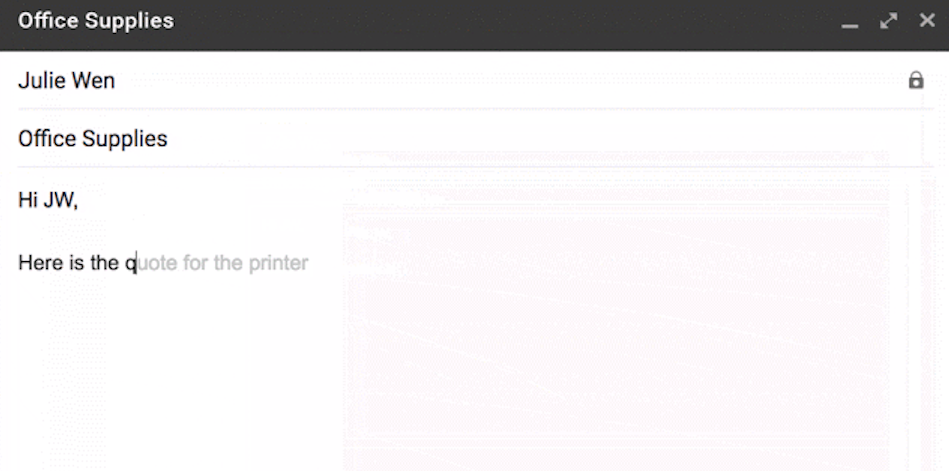
Example: Text completion
No extra "labeling" of the data required!
GPT-4 is "just" doing next-word prediction
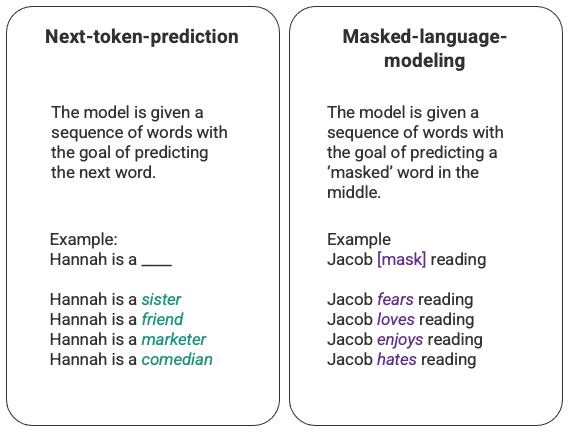
But it's trained on the entire internet...
And it's a really big network
Generative AI for Images
Humans have also put lots of captioned images on the web

...
Dall-E 2. Tested in Sept, 2022
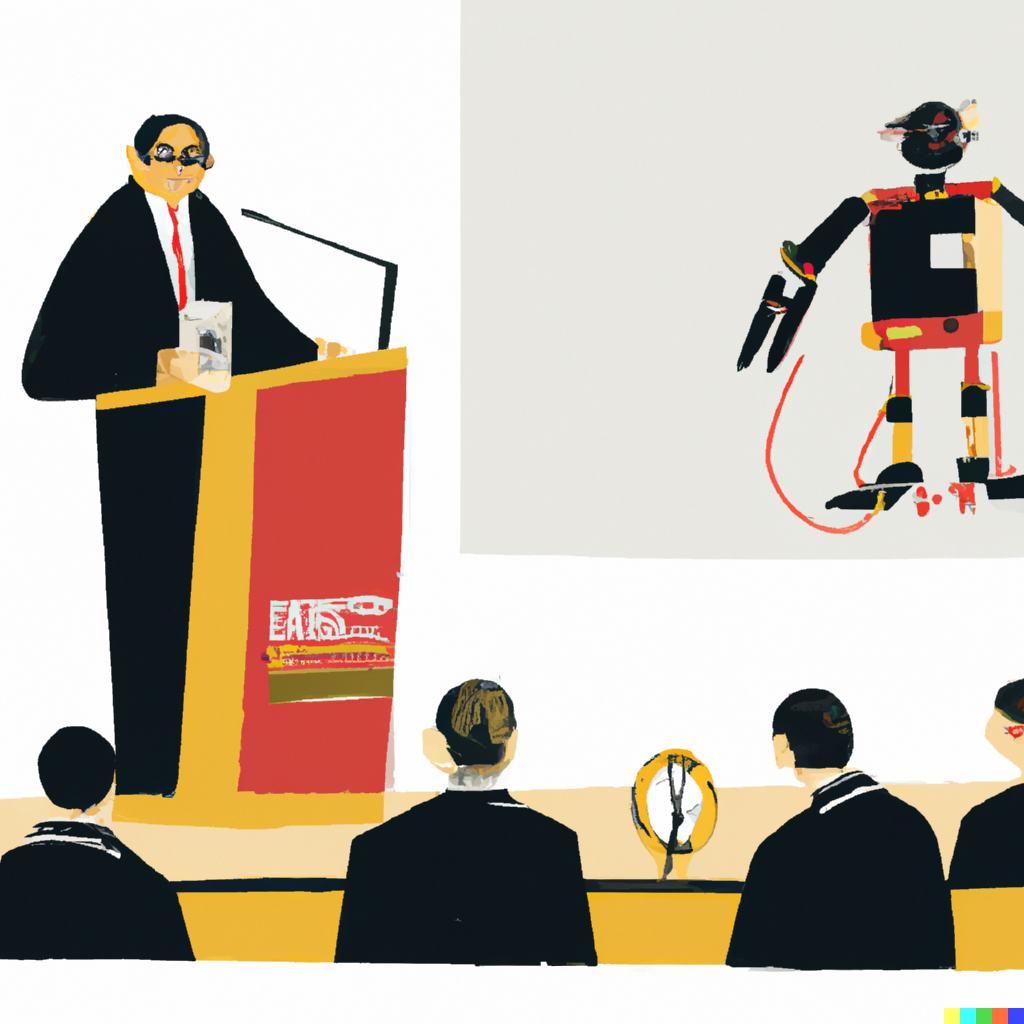
"A painting of a professor giving a talk at a robotics competition kickoff"
Input:
Output:
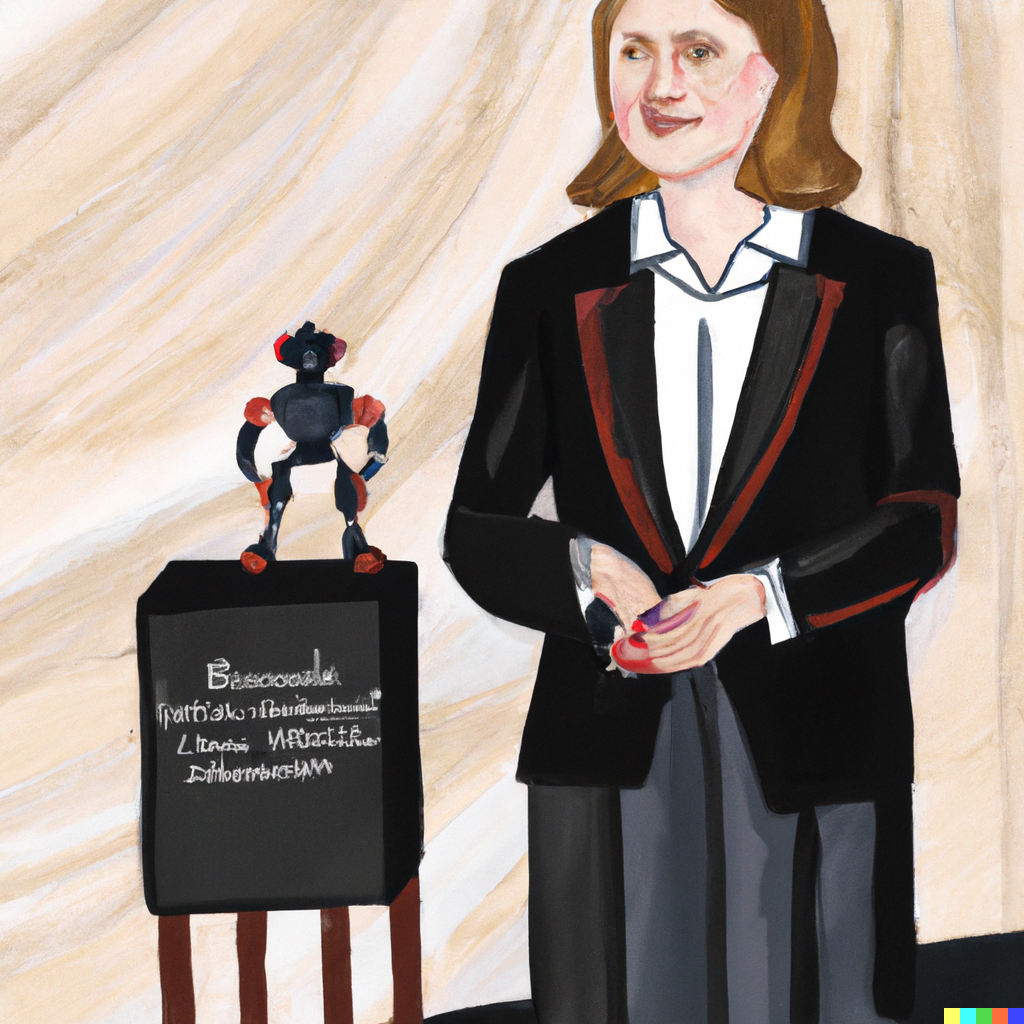
Dall-E 3. Sept, 2023
"a painting of a handsome MIT professor giving a talk about robotics and generative AI at brimmer and may school in newton, ma"
Input:
Output:
An image is just a list of numbers (pixel values)
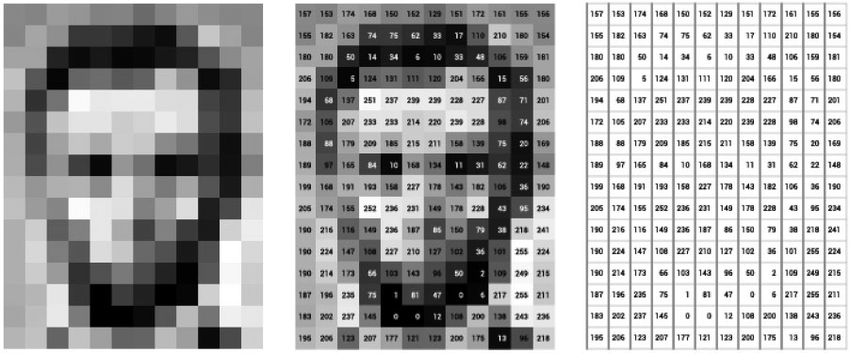
Is Dall-E just next pixel prediction?
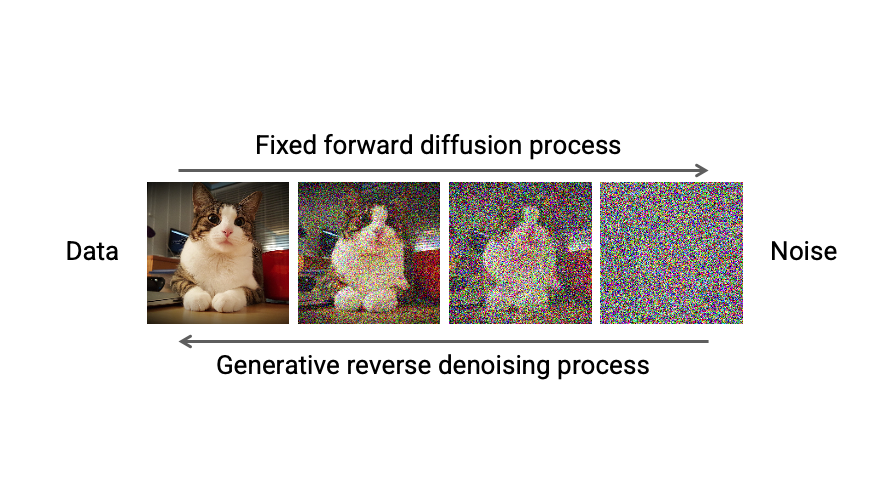
"Diffusion" models
Generative AI for robots?
Generative AI + data
+ very careful engineering
Our engineering design process
+ rigorous thinking
Haptic Teleop Interface
Excellent robot control
Cameras in the hands!

Open source:
LLMs \(\Rightarrow\) VLMs \(\Rightarrow\) LBMs
large language models
visually-conditioned language models
large behavior models
\(\sim\) VLA (vision-language-action)
\(\sim\) EFM (embodied foundation model)
Q: Is predicting actions fundamentally different?
Why actions (for dexterous manipulation) could be different:
- Actions are continuous (language tokens are discrete)
- Have to obey physics, deal with stochasticity
- Feedback / stability
- ...
should we expect similar generalization / scaling-laws?
Success in (single-task) behavior cloning suggests that these are not blockers
Prediction actions is different
- We don't have internet scale action data (yet)
- We still need rigorous/scalable "Eval"
The Robot Data Diet

Big data
Big transfer
Small data
No transfer
robot teleop

(the "transfer learning bet")

Open-X
simulation rollouts

novel devices
Cumulative Number of Skills Collected Over Time
The (bimanual, dexterous) TRI CAM dataset

CAM data collect

TRI has a special role to play
- Expertise across robotics, ML, and software
- Resources to train large models and do rigorous evaluation
- Resources to build large high-quality datasets
- Ability to advance robot hardware
- Our charter is basic research ("invent and prove")
- Strong tradition of open source
+ Amazing university partners
Just one piece of TRI's robotics portfolio...
Online classes (videos + lecture notes + code)
http://manipulation.mit.edu
http://underactuated.mit.edu